A friendly tour · v0.5
Spiking neural
networks are
convex optimizers.
A simple population of leaky integrate-and-fire neurons, with the right connectivity, solves a quadratic program. Each spike is a constraint becoming active. Each silence is a gradient step. The page below walks through the idea, the math, and a runnable Python implementation.
- Install
pip install snn-opt- Backends
- Python · C++
- License
- Apache-2.0
A 2-D quadratic with three half-space constraints. The trajectory drifts toward x*ᵤ, spikes at each active wall, and settles at the constrained optimum.
Three beats
The idea, distilled.
The whole framework collapses into three repeating moves. Everything else, the convergence proofs, the hardware story, the spike raster, falls out of these.
Drift.
Between spikes, each neuron's membrane voltage moves by the gradient of an objective. Plain gradient descent, dressed up as biology.
Spike.
When the voltage would push the trajectory past a constraint, a spike fires. The spike re-projects the state onto the feasible boundary: a discrete correction.
Settle.
The spike train and the drift balance at the constrained optimum. Active spikes encode the active constraint set. The math is exactly that of a primal-dual QP solver.
A picture
What it
looks like.
An 8-D quadratic whose optimum lies outside a 16-facet polytope. Each dot is one projection event. Watch the network search: one facet fires a short burst and falls silent, three more are recruited in turn and then fire on every step. Those three are exactly the constraints active at the true optimum.
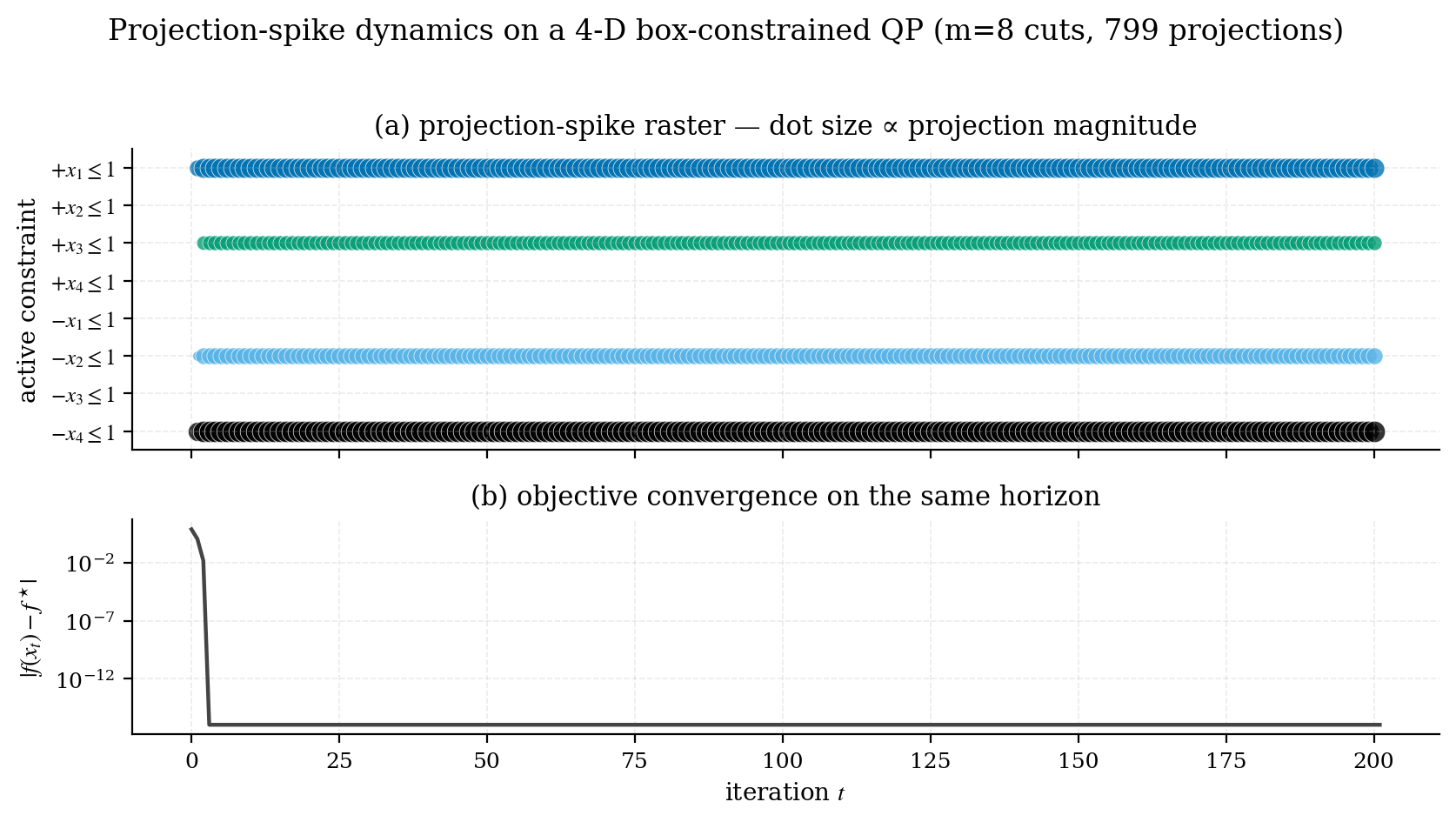
benchmarks/02_spike_raster.py.
Accuracy
Where it
stops.
The dynamics converge to a fixed point of the discretised flow, which is not quite the minimiser of the QP. The offset shrinks with the gradient step, but a smaller step needs more iterations to arrive, so every iteration budget has its own best setting.
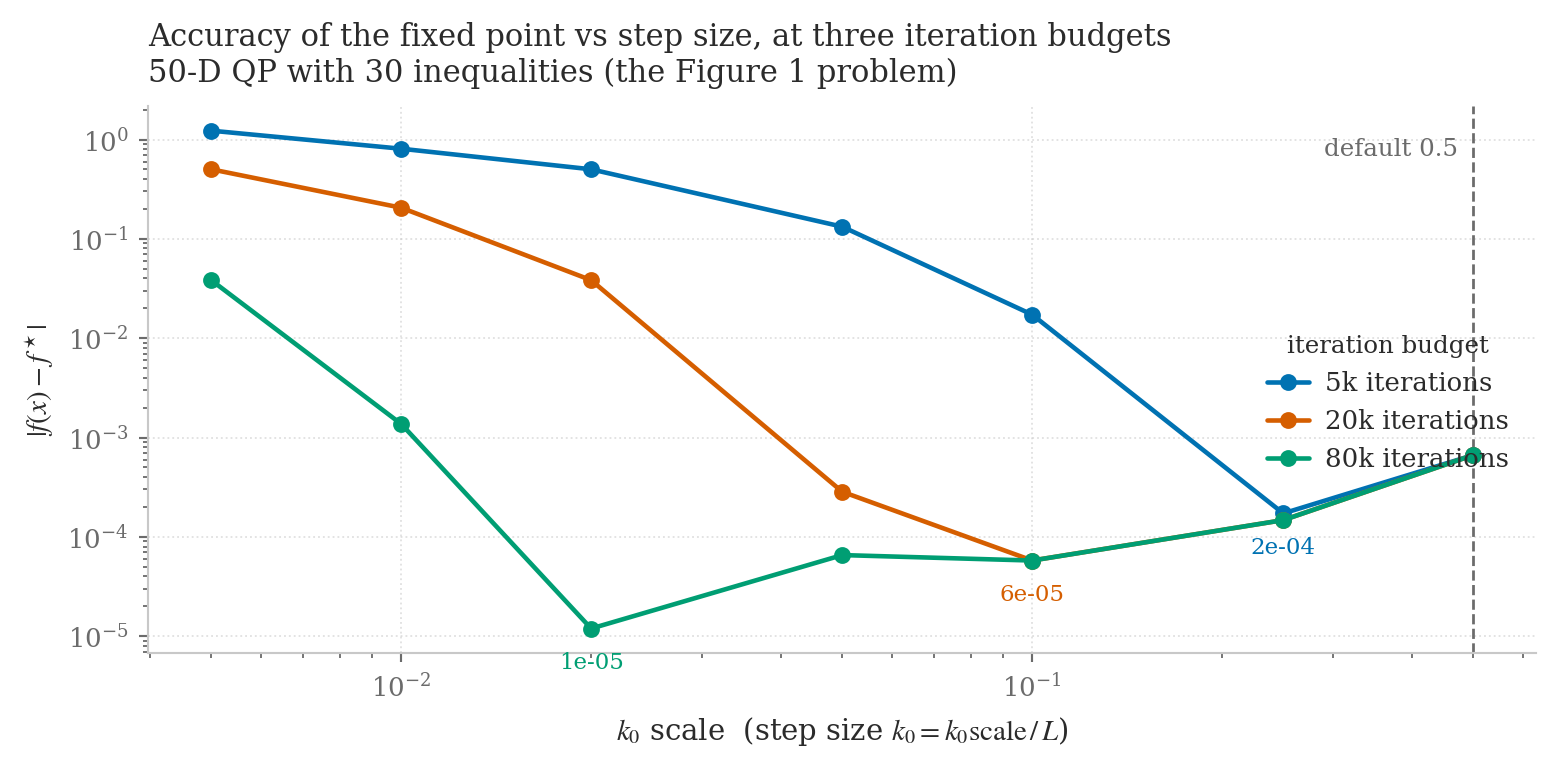
benchmarks/04_accuracy_tuning.py.
Three fields on the result expose different parts of the answer, and
they are worth checking on any real problem. joint_feasible reports
feasibility of the constraint rows and the bounds together.
stationarity_residual is a scale-dependent eps-KKT
diagnostic: where converged tells you the network reached
its fixed-point criteria, this estimates the remaining stationarity,
complementarity, and primal defect.
projection_budget_exhausted flags a solve that ran out of
inner projection steps, which now aborts rather than being reported as
success. The repository README
has the full treatment.
Map
What you'll
find here.
Four entry points. Pick whichever matches your appetite: the intuition essay, the hands-on tutorials, the published papers, or the source code itself.
- Intro essay · 8 min
The spiking idea explained from scratch, with no prior neuromorphic background required.
- Tutorials hands-on
Walkthroughs: formulating SVMs, ridge regression, PCA and a few control problems as QPs you can drop into the solver.
- Papers peer-reviewed
The published work that uses this framework, with abstracts and DOI links.
- snn_opt repo source · Apache-2.0
Canonical Python implementation: solver, compiled C++ backend (HLS-compatible for FPGA deployment), examples, benchmarks, full mathematical writeup.
Install
Two lines
and you're in.
Prebuilt wheels for Linux (x86_64, aarch64), macOS (Apple Silicon), and Windows across CPython 3.9–3.13. The compiled C++ backend ships inside the wheel; no toolchain needed on your side.
pip install snn-opt
Then head to the Quickstart for a
five-minute walkthrough. The PyPI distribution name is
snn-opt (hyphenated, per PEP 503); the Python import
name is snn_opt. Pick the C++ kernel with
backend='c' for a roughly 10× speedup on the inner
projection loop. The same kernel source is HLS-compatible and is the
basis for the planned FPGA deployment.
For whom
Who this is for.
Students starting a thesis on neuromorphic methods. Researchers from optimization or control who heard "spiking networks" and weren't sure what to make of it. Anyone who finds beauty in connections between fields that look unrelated until they don't.
If you want the formal version: head to the
snn_opt repository
for the full theory document, an academic-style README, and
a benchmark suite. The pages here are the
friendly version of the same material.
Acknowledgments
Acknowledgments.
Developed at the School of Artificial Intelligence, Taizhou University.
This codebase implements the SNN-QP research program led by Prof. Shuai Li (IEEE Fellow; Faculty of Information Technology and Electrical Engineering, University of Oulu, Finland), whose work on neurodynamic optimization originated this line of inquiry. The mathematical framework follows Mancoo, Boerlin and Machens (NeurIPS 2020) and the broader projection-neural-network lineage (Hopfield–Tank, Kennedy–Chua, Xia–Wang, Liu–Wang).